

实战!手把手教你如何编写一个Linux驱动并写一个支持物联网的LED演示demo
发布于2021-06-07 21:35 阅读(1702) 评论(0) 点赞(2) 收藏(5)
目录
一.开发环境
开发板:
核心板:TQ210CoreB
底板:TQ210 V4
CPU:s5pv210
内核:Linux_kernel_3.0.8
交叉编译系统环境:
操作系统:ubnutu16.04
编译器:arm-embedsky-linux-gnueabi工具链 4.4.6
所需知识点:
若你是刚入门的学生不太看得懂原理图与芯片手册,请先看下这篇文章中针对电路原理与芯片文档这块的教程:详细介绍如何读懂STM32开发板电路原理图以及芯片文档和开发手册,并编写一个测试程序:点亮一个LED灯
本文还需要对Linux设备管理器有一定的了解,否则你开发时只知道调这些函数,但不知道内核态发生了什么,所以建议大家学一下相关知识点:Linux嵌入式开发_主设备号与次设备号详解、Linux驱动开发_设备文件系统详解
本文使用GIT来管理项目,GIT方面的教程:关于Git这一篇就够了
内核开发基本知识:Linux内核开发_内核模块
针对位的高级应用:c语言位操作的高级应用
HTTP方面:
这些知识点我都在别的文章中有详细的解释,若对单片机/嵌入式体系基础较差的同学可以看一看。
本篇教程较为类GNU/LINUX风格,从目录体系到项目管理,都会以类GNU/LINUX风格编写
即便是一个小demo我们也要用git来管理,这是为了加深大家对git的了解与认识,也为将来的工作做准备。
请大家先看完上面的知识在继续学习本篇知识。
二. 准备工作:
工欲善其事必先利其器,当我们开发一个项目工程时,需要构建好项目体系,这样便于我们后面的开发,也让我们的项目变得可维护性更高一点
1. 创建一个项目工程目录
mkdir moudul && cd moudul2. 创建输出与目标目录
arch、output
这两个目录将用于目标文件的输出以及中间文件的输出目录。
在arch目录下在新建一个arm的目录,因为我们的板子是arm架构,所以新建一个目录用来存放arm的目标文件,这样的体系是源于Linux内核目录体系
- mkdir arch && mkdir arch/arm
- mkdir output
3.头文件目录
在建立一个头文件目录,同时在include目录下创建一个目录TQ210_LED,代表工程类型,然后在这个目录下创建两个子目录:device、app,用来存放驱动/app的头文件
- mkdir include
- mkdir include/TQ210_LED
- mkdir include/TQ210_LED/device
- mkdir include/TQ210_LED/app
4. 建立源代码src目录
目录结构与头文件目录一致
- mkdir src
- mkdir src/TQ210_LED
- mkdir src/TQ210_LED/device
- mkdir src/TQ210_LED/app
好了到此我们的工程体系已经建立完成
- beis@ubuntu:~/moudul$ tree
- .
- ├── arch
- │ └── arm
- ├── include
- │ └── TQ210_LED
- │ ├── app
- │ └── device
- ├── output
- └── src
- └── TQ210_LED
- ├── app
- └── device
目录结构分配的非常清晰合理,当我们新增别的模块时,只需要按照这个规范在src与include下建立不同的类型目录就可以了
若别的架构只需要在arch下建立对应的架构目录即可。
目录体系完成之后我们在使用GIT来管理我们的项目
5. 使用git管理你的项目
git init三.编写LED驱动
在src/TQ210_LED/device目录下新建一个.c文件和在include/TQ210_LED/device目录下新建一个.h文件
- touch src/TQ210_LED/device/TQ210_LED_device.c
- touch include/TQ210_LED/device/TQ210_LED_device.h
然后使用vim打开.c文件我们就可以开始编写驱动模块啦
vim src/TQ210_LED/device/TQ210_LED_device.c现在我们打开电路原理图,这是开发步骤的必须的第一步,因为只有看原理图才知道电路的结构。

在原理图中找到LED这一块并放大

从原理图中可以得知LED1、LED2都接在GPC端口上。
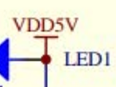 vdd表示器件内部工作电压的符号,vdd5v的意思就是至少需要5伏电压才能让此器件工作,不过这个我们一般不用关系,这个一般由PCB板设计者们已经完成了,输入源端已经设定好电阻之类的器件器件来控制电流通过,包括板子使用的电流模式。
vdd表示器件内部工作电压的符号,vdd5v的意思就是至少需要5伏电压才能让此器件工作,不过这个我们一般不用关系,这个一般由PCB板设计者们已经完成了,输入源端已经设定好电阻之类的器件器件来控制电流通过,包括板子使用的电流模式。
 R开头的这样的电路符号一般都是电阻名字,1K=1000欧姆,也就是说当电压流过时它会吸收掉1000欧姆的电压。
R开头的这样的电路符号一般都是电阻名字,1K=1000欧姆,也就是说当电压流过时它会吸收掉1000欧姆的电压。
 这是一个放大三极管,用于放大电流的,型号是S8050,符号是Q,Q1代表一号放大三极管。
这是一个放大三极管,用于放大电流的,型号是S8050,符号是Q,Q1代表一号放大三极管。
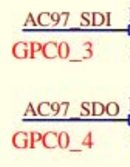 从这里可以看到LED1和LED2分别接在GPC0号端口上,位为3与4
从这里可以看到LED1和LED2分别接在GPC0号端口上,位为3与4
这里我教大家如何通过GPC0_4这个标识来找到芯片手册里的对应标志位
我们打开芯片手册,先看下GPIO的框架图
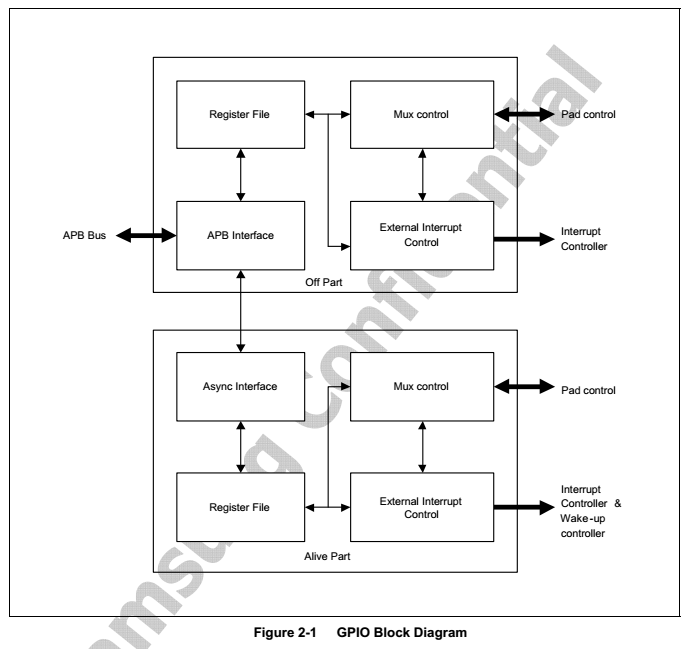
它由两部分组成 OFF PART(断电部分)和ALILVE PART(带电部分)
两者分别为,睡眠模式与非睡眠模式,也就是说这个GPIO框架支持睡眠模式与非睡眠模式,若进入睡眠模式则整个框架内部时钟将停止工作,等待其它中断将其唤醒,同时在睡眠模式下是能够保证其GPIO内部寄存器的值的。
它挂载在APB总线上,并且APB没有挂接到RCC这样的时钟总线上,不像STM32是挂接在这个总线上,若不先开启它则APB总线不会工作,这是STM32出于低功耗的设计。
接着我们找到GPC端口的描述

这里建议大家在打开PDF时使用CTRL+F去搜索GPC0能快速找到对应的说明页
按照单片机的开发的经验来说,我们可以知道若想让一个GPC口工作,必须使其设置为OUTPUT模式
同时可以看到DAT寄存器的介绍
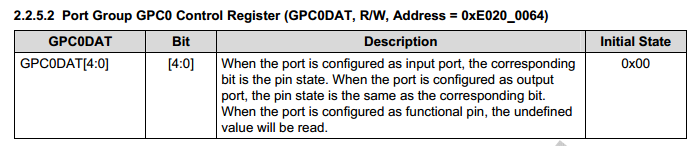
DAT说明:
当端口配置为输入端口时,对应位为引脚状态当端口配置为输出端口时,引脚状态与对应位相同当端口配置为功能引脚时,将读取未定义的值。
也就是说CON对应端口是输出时,DAT对应的就是状态值,给1即高电平,给0即低电平。
在三星s5pv210中每个GPIO口由CON和DAT组成,CON是控制状态,DAT是输入输出状态。
并且我们可以看到GPC0CON的端口地址为:0xE0200060
GPC0DAT的端口地址为:0XE0200064 相差四字节。
一个32位机器上的int的大小。
基本上硬件以及地址信息我们都知道了,那么就是正式写代码开始进行开发了。
三.一 准备工作
在你的src/device目录下新建一个.c的文件
touch src/TQ210_LED/device/TQ210_device_led.c同时在创建头文件:
touch include/TQ210_LED/device/TQ210_device_led.c然后使用你喜欢的编辑工具开始写代码吧!
首先在.c文件中包含基本头文件:
- #include <linux/module.h>
- #include <linux/ioport.h>
- #include <linux/io.h>
- #include <linux/platform_device.h>
- #include <linux/init.h>
- #include <linux/serial_core.h>
- #include <linux/serial.h>
- #include <asm/irq.h>
- #include <mach/hardware.h>
- #include <plat/regs-serial.h>
- #include <mach/regs-gpio.h>
- #include <asm/uaccess.h>
基本信息:
- //author
- MODULE_AUTHOR("Stephen Zhou");
- MODULE_LICENSE("GPL");
init与exit:
- static int __init led_init(void){
-
- }
-
- static void __exit led_exit(void){
-
- }
-
- module_init(led_init);
- module_exit(led_exit);
我们在增加一些基本信息:
这些信息用来存储针对设备处理器用的名字,这些在之前的文件系统详解中都有详细说过
先定义存放/dev下的名字,这个是给udev看的:
- //led one and two name
- #define LED_ONE_NAME "TQ210_LED_ONE"
- #define LED_TWO_NAME "TQ210_LED_TWO"
定义内核模块表中的名字,以及sysfs的名字,这个是给内核和sysfs文件系统看的
- //led name in kernel
- #define LED_KERNEL_NAME "TQ210_LED"
- #define LED_SYSFS_CLASS_NAME "TQ210_LED_CLASS"
led数量,这个是给我们程序自己看的
- //led device number max
- #define LED_NUMBER_MAX 2
在写几个针对位操作的函数:
- //set or get gpic bit value
- #define SET_GPIC(GPIC_ADDRESS,VALUE,OPE) *GPIC_ADDRESS OPE VALUE
- #define SET_GPIC_STATE(GPIC_ADDRESS,LED1_VALUE,LED2_VALUE,OPE) *GPIC_ADDRESS OPE (LED1_VALUE | LED2_VALUE)
- #define GET_GPIC(GPIC_ADDRESS,VALUE) *GPIC_ADDRESS & VALUE
-
- //led gpic port
- #define LED1_GPIC_BIT(VALUE) (VALUE << 12)
- #define LED2_GPIC_BIT(VALUE) (VALUE << 16)
- #define LED1_GPIC_DAT_BIT(VALUE) (VALUE << 3)
- #define LED2_GPIC_DAT_BIT(VALUE) (VALUE << 4)
属性宏:
- //device gpic address
- #define GPIC0_CON_ADDRESS 0xE0200060
- #define GPIC0_DAT_ADDRESS 0xE0200064
- #define GPIC_ADDRESS_FORMAT 16
-
- //state
- #define LED_STATE_ON "ON"
- #define LED_STATE_OFF "OFF"
好了,接下来我们去实现init函数
三.二 init实现
在实现init函数之前我们在.c文件中申请几个全局变量,用来存储不同的属性:
存储led名字:
char LED_NAME[][256] = {{LED_ONE_NAME},{LED_TWO_NAME}};存储con与dat地址:
- volatile unsigned long* GPIC0_address = NULL;
- volatile unsigned long* GPIC0_dat = NULL;
存储内核fd与类(sysfs)fd:
- //drive struct
- static int led_kernel_fd = 0; //kernel struct fd
- static struct class* led_device_file_class = NULL; //sysfs fd
- static struct device* led_device_class_son[LED_NUMBER_MAX] = {NULL};
除此之外还需要一个结构体:
struct file_operations这个结构体就是用来存储文件函数指针的,write、open等函数实现
为此我们先将write、open先定义出来,什么都不做,后面我们在实现:
- //open
- static int led_open(struct inode* inode,struct file* file){
-
- }
-
- //write
- static ssize_t led_write(struct file* file,const char __user* buf,size_t count,loff_t* ppos){
-
- }
-
- //read
- static ssize_t led_read(struct file* file,char __user* buf,size_t count,loff_t* ppos){
-
- }
-
- //ioctl
- static long led_ioctl(struct file* file,unsigned int cmd,unsigned long arg){
-
- }
注意根据内核版本不同,在内核部分的write、read函数原型不同,可以根据自己开发板子使用的内核版本来查一下。
我们把fops结构体定义出来:
- //drive struct
- static struct file_operations led_drive_fops = {
-
- .owner = THIS_MODULE,
- .open = led_open,
- .write = led_write,
- .read = led_read,
- .unlocked_ioctl = led_ioctl,
- };
里面的THIS_MODULE是一个地址,这个会在预编译期间被编译器替换为当前模块的地址,也就是说它指向当前模块。
init函数的目的:
将设备注册到内核并注册到类文件系统,将udev注册到dev dir
第一步注册到内核结构体中
注意在内核模块中我们尽量多打日志,利用printk函数,便于我们调试
因为内核态是不能用GDB这些来调试的。
- led_kernel_fd = register_chrdev(0,LED_KERNEL_NAME,&led_drive_fops);
- if(led_kernel_fd < 0){
- printk("TQ210_LED[ERROR]: register_chrdev - %d\n",led_kernel_fd);
- return -1;
- }
第二步 注册到sysfs/sys/class dir,申请一个父节点
led_device_file_class = class_create(THIS_MODULE,LED_SYSFS_CLASS_NAME);第三步注册子设备到类sysfs中,作为子节点
注意编译器是c99,我们不能在代码部分声明变量,所以在开头加一个i的定义
int i = 0; //for c99 - for(; i < LED_NUMBER_MAX; ++i){
- led_device_class_son[i] = device_create (led_device_file_class,NULL,MKDEV(led_kernel_fd,i),NULL,LED_NAME[i]);
- if(unlikely(IS_ERR(led_device_class_son[i]))) {
- printk("TQ210_LED[ERROR]: register son device\n");
- return -2;
- }
- }
-
最后一步将物理地址映射到内核虚拟地址:
操作系统出于alu地址随机化保护原因,是不能直接访问物理地址的,需要先转化为虚拟地址。
- GPIC0_address = (volatile unsigned long*)ioremap(GPIC0_CON_ADDRESS,GPIC_ADDRESS_FORMAT);
- GPIC0_dat = (volatile unsigned long*)ioremap(GPIC0_DAT_ADDRESS,GPIC_ADDRESS_FORMAT);
最后打印一下表示我们成功初始化init了。
- printk("TQ210_LED[SUCCESS]:init\n");
- return 0;
在实现一下exit函数:
三.四 exit实现
先释放子类节点,注意这里的释放是有顺序之分的
因为我们在注册的时候是先注册到内核-sysfs-sysfs子节点这样的一个流程。
在设备文件详解里我说过它的寻找方式,当我们open一个/dev下的文件时,先调用中断的do_sys_open,然后在调用do_filp_open,来从文件系统中获取节点,VFS中,因为/dev目录下的文件是存在于磁盘上的,但是这个文件都在VFS的文件描述结构体中又注册,因为VFS是管理磁盘的,然后在调用open_namei函数来根据name在VFS中获取指向这个文件的指针。
最后通过这个指针可以找到这个文件指向哪个open、write等,最后会发现通过它里面的文件指针找到的是sysfs,udev只负责根据class目录下的结构把文件注册到VFS的磁盘/DEV目录下。
然后sysfs里的节点指向内核中的节点,所以当我们想删除一个节点的话,如果先删除的是内核里的节点的话,你在去删除sysfs里的节点会发现出现段错误。
这个原因大概是因为找到sysfs节点时,linux会判断指向的内核指针是否有效,来确认这是否是一个正常的设备。
所以我们怎么注册的,就怎么反着来释放。
先释放子节点
- int i = 0; //for c99
-
- for(; i < LED_NUMBER_MAX; ++i){
- device_unregister(led_device_class_son[i]);
- }
-
释放父节点
class_destroy(led_device_file_class);
关闭io映射
- iounmap(GPIC0_address);
- iounmap(GPIC0_dat);
删除内核里的模块信息
unregister_chrdev(led_kernel_fd,LED_KERNEL_NAME);在打印一行log
printk("TQ210_LED[SUCCESS]:exit\n");在打印时非常建议大家在前面加上标识符,这样在输出log时使用grep能更清楚看到你的日志。
到这里你的雏形驱动已经完成了,你编译好之后在使用insmod命令安装的话就会看到/dev目录下对应的节点。
当使用sysfs注册时,sysfs会自动通知udev的。
现在开始写make,回到顶层目录下
三.五 make实现
内核模块的make写法已经在之前的linux内核模块文章中说过了
这里交叉编译的话记得修改KDIR还有CROSS_COMPILE的变量值就可以了
- ifneq ($(KERNELRELEASE),)
- obj-m := ./src/TQ210_LED/device/TQ210_device_led.o
- else
- KDIR := /home/beis/TQ/opt/EmbedSky/TQ210/Kernel_3.0.8_TQ210_for_Linux_v2.4
- all:
- $(MAKE) -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-embedsky-linux-gnueabi-
- mv ./src/TQ210_LED/device/*.mod.c ./output
- mv ./src/TQ210_LED/device/*.ko ./arch/arm/TQ210_LED
- clean:
- $(MAKE) -C $(KDIR) M=$(PWD) clean
- rm ./output/*
- endif
然后你在make一下,就可以在arch/arm/TQ210_LED目录下看到你的ko文件了。
完成初步之后就需要git保存一下啦
- git add .
- git commit -m "one"
那么接下来回到驱动文件下实现open函数
三. 六 open实现
首先我们可以利用MINOR取的当前操作的子节点
int son_id = MINOR(inode->i_rdev);然后利用switch来对不同节点做不同的处理,这样就不用写多个驱动文件了
同一驱动类型,非常建议这么做。
- switch(son_id){
-
- case 0: //led one
-
- break;
-
- case 1: //led two
-
- break;
-
- default:
- printk("TQ210_LED[ERROR]: error son device number\n");
- return -1;
- break;
-
- }
首先利用我们写好的位函数,把led开启成输出模式
首先是先清空,在开启,这样方便进行位运算,从而不被其他位影响。
- case 0: //led one
- SET_GPIC(GPIC0_address,~LED1_GPIC_BIT(0xf),&=); //clear
- SET_GPIC(GPIC0_address,LED1_GPIC_BIT(0x1),|=); //output
- break;
-
- case 1: //led two
- SET_GPIC(GPIC0_address,~LED2_GPIC_BIT(0xf),&=); //clear
- SET_GPIC(GPIC0_address,LED2_GPIC_BIT(0x1),|=); //output
- break;
针对初学者,可能对位还不是特别懂,这里我给大家拆一下,详细说一下这个步骤
把宏展开给大家看下,以LED1举例
*GPIC0_address &= ~((0xf<<(12));上面原理图说过,CON3[15:12]是设置模式的,0xf的二进制是1111,左移12位是1111000000000000,然后在与原位做与运算,与运算特点:两位同时为1则为1,不相同则为0
然后这里取反就是0000111111111111,与CON3做与运算:
假设CON3是1011000000001000
1011000000001000
——————————
00001111111111110
——————————
0000000000001000
可以看到非常巧妙的利用与特点,没有修改其它位把我们想要设置的位给清空了。
第二个也与之一样,在你对这些含糊不清的时候,请拿起笔来自己运算,让自己清楚才是真正明白了。
*GPIC0_address |= ((0x1<<(12));左移12位:0001000000000000 ,或运算的特点:当一个bit位为1,则为1,所以不用做取反运算了。
0000000000001000
——————————
0001000000000000
——————————
0001000000001000
也在没有修改其它位的情况下完成了。
open实现完整代码:
- static int led_open(struct inode* inode,struct file* file){
-
- /* open device and init */
-
- //get son device number
- int son_id = MINOR(inode->i_rdev);
-
- switch(son_id){
-
- case 0: //led one
- SET_GPIC(GPIC0_address,~LED1_GPIC_BIT(0xf),&=); //clear
- SET_GPIC(GPIC0_address,LED1_GPIC_BIT(0x1),|=); //output
- break;
-
- case 1: //led two
- SET_GPIC(GPIC0_address,~LED2_GPIC_BIT(0xf),&=); //clear
- SET_GPIC(GPIC0_address,LED2_GPIC_BIT(0x1),|=); //output
- break;
-
- default:
- printk("TQ210_LED[ERROR]: error son device number\n");
- return -1;
- break;
-
- }
-
- printk("TQ210_LED[SUCCESS]:open\n");
- return 0;
- }
三.七 write实现
获取子节点
int son_id = MINOR(file->f_dentry->d_inode->i_rdev);这里我们利用一个函数从用户态往内核态拿一下参数,记得失败打log
- char val = 0;
- if(copy_from_user(&val,buf,count)){ printk("TQ210_LED[ERROR]:get user variable\n"); return -1; }
然后实现:
就是判断写入的是1则亮,0则灭,位运算在open已经仔细说过了,这里就不展开说了。
我们这里的操作要对dat寄存器,上面开头也说过了。
- switch(son_id){
-
- case 0: //led one
- if(val == 1){ SET_GPIC_STATE(GPIC0_dat,LED1_GPIC_DAT_BIT(1),LED2_GPIC_DAT_BIT((GET_GPIC(GPIC0_dat,LED2_GPIC_DAT_BIT(1)))),|=); }else{ SET_GPIC_STATE(GPIC0_dat,~LED1_GPIC_DAT_BIT(1),(GET_GPIC(GPIC0_dat,0)),&=); }
- printk("TQ210_LED[MSG]:led one\n");
- break;
-
- case 1: //led two
- if(val == 1){ SET_GPIC_STATE(GPIC0_dat,LED2_GPIC_DAT_BIT(1),LED1_GPIC_DAT_BIT(GET_GPIC(GPIC0_dat,LED1_GPIC_DAT_BIT(1))),|=); }else{ SET_GPIC_STATE(GPIC0_dat,~LED2_GPIC_DAT_BIT(1),(GET_GPIC(GPIC0_dat,0)),&=); }
- printk("TQ210_LED[MSG]:led two\n");
- break;
-
- default:
- printk("TQ210[ERROR]:can't write device number\n");
- break;
-
- }
最后打印一下:
- printk("TQ210_LED[SUCCESS]:write\n");
- return 0;
完整实现:
- static ssize_t led_write(struct file* file,const char __user* buf,size_t count,loff_t* ppos){
-
- //write device
-
- //get son device number
- int son_id = MINOR(file->f_dentry->d_inode->i_rdev);
-
- //get user variable to kernel variablei
- char val = 0;
- if(copy_from_user(&val,buf,count)){ printk("TQ210_LED[ERROR]:get user variable\n"); return -1; }
-
- switch(son_id){
-
- case 0: //led one
- if(val == 1){ SET_GPIC_STATE(GPIC0_dat,LED1_GPIC_DAT_BIT(1),LED2_GPIC_DAT_BIT((GET_GPIC(GPIC0_dat,LED2_GPIC_DAT_BIT(1)))),|=); }else{ SET_GPIC_STATE(GPIC0_dat,~LED1_GPIC_DAT_BIT(1),(GET_GPIC(GPIC0_dat,0)),&=); }
- printk("TQ210_LED[MSG]:led one\n");
- break;
-
- case 1: //led two
- if(val == 1){ SET_GPIC_STATE(GPIC0_dat,LED2_GPIC_DAT_BIT(1),LED1_GPIC_DAT_BIT(GET_GPIC(GPIC0_dat,LED1_GPIC_DAT_BIT(1))),|=); }else{ SET_GPIC_STATE(GPIC0_dat,~LED2_GPIC_DAT_BIT(1),(GET_GPIC(GPIC0_dat,0)),&=); }
- printk("TQ210_LED[MSG]:led two\n");
- break;
-
- default:
- printk("TQ210[ERROR]:can't write device number\n");
- break;
-
- }
-
- printk("TQ210_LED[SUCCESS]:write\n");
- return 0;
-
- }
三.八 read实现
read实现也很简单,就是利用位运算去读位的值,唯一用到的就是用户态向内核态传递参数的函数:copy_to_user
完整代码:
- static ssize_t led_read(struct file* file,char __user* buf,size_t count,loff_t* ppos){
-
- //read led state
-
- int son_id = MINOR(file->f_dentry->d_inode->i_rdev);
-
- int BIT = 0;
- char on[2] = LED_STATE_ON;
- char off[3] = LED_STATE_OFF;
- switch(son_id){
-
- case 0:
- BIT = GET_GPIC(GPIC0_dat,LED1_GPIC_DAT_BIT(1));
- if(BIT){
-
- if(copy_to_user((char*)buf,&on,sizeof(on))) return -EFAULT;
-
- }else{
- if(copy_to_user((char*)buf,&off,sizeof(off))) return -EFAULT;
- }
- break;
-
- case 1:
- BIT = GET_GPIC(GPIC0_dat,LED2_GPIC_DAT_BIT(1));
- if(BIT){
-
- if(copy_to_user((char*)buf,&on,sizeof(on))) return -EFAULT;
- return 2;
-
- }else{
- if(copy_to_user((char*)buf,&off,sizeof(off))) return -EFAULT;
- return 3;
- }
- break;
-
- default:
- printk("TQ210[ERROR]:can't write device number\n");
- return -1;
- break;
-
- }
-
- printk("TQ210_LED[SUCCESS]:read\n");
- return 0;
- }
三.九 ioctl实现
ioctl的实现的话,linux是有要求的,ioctl思想是利用参数来获取对应属性,实现对应功能。
linux内核是利用命令码实现这些,开发者利用switch case来对不同的命令码进行不同的实现
在内核里一个命令码是这样的:
- ________________________________________
-
- | 设备类型 | 序列号 | 方向 | 数据尺寸 |
-
- |----------|--------|------|-------- |
-
- | 8 bit | 8 bit | 2 bit |8~14 bit |
-
- |----------|--------|------|------------ |
linux内核也提供了一些实现宏定义
- //nr为序号,datatype为数据类型,如int
- _IO(type, nr ) //没有参数的命令
- _IOR(type, nr, datatype) //从驱动中读数据
- _IOW(type, nr, datatype) //写数据到驱动
- _IOWR(type,nr, datatype) //双向传送
例子:
- #define MEM_IOC_MAGIC 'm' //定义类型
- #define MEM_IOCSET _IOW(MEM_IOC_MAGIC,0,int)
- #define MEM_IOCGQSET _IOR(MEM_IOC_MAGIC, 1, int)
linux也提供了一些判断参数是否有效的宏函数
- _IOC_NR() 读取基数域值 (bit0~ bit7)
- _IOC_TYPE 读取魔数域值 (bit8 ~ bit15)
- _IOC_SIZE 读取数据大小域值 (bit16 ~ bit29)
- _IOC_DIR 获取读写属性域值 (bit30 ~ bit31)
我的定义:
- //ioctl
- #define MEMDEV_IOC_MAGIC 's'
- #define MEMDEV_IOCPRINT _IO(MEMDEV_IOC_MAGIC, 1)
- #define MEMDEV_IOCGETDATA _IOR(MEMDEV_IOC_MAGIC, 2, int)
- #define MEMDEV_IOCSETDATA _IOW(MEMDEV_IOC_MAGIC, 3, int)
- #define MEMDEV_IOC_MAXNR 3
依旧取子节点
- int par = 0;
- int son_id = MINOR(file->f_dentry->d_inode->i_rdev);
判断类型是否有效:
- if(_IOC_TYPE(cmd) != MEMDEV_IOC_MAGIC)
- return -EINVAL;
判断参数是否有效
- if(_IOC_NR(cmd) > MEMDEV_IOC_MAXNR)
- return -EINVAL;
在判断读写属性是否有效
- if (_IOC_DIR(cmd) & _IOC_READ){ if(access_ok(VERIFY_WRITE, (void *)arg, _IOC_SIZE(cmd))){ return -EFAULT; } }
- else if(_IOC_DIR(cmd) & _IOC_WRITE) { if (access_ok(VERIFY_READ, (void *)arg, _IOC_SIZE(cmd))){ return -EFAULT; } }
这里利用了一个access_ok是一个宏,用来判断参数的读写是否有效。
接下来就是具体实现啦
只需要判断cmd的属性就可以了。
- switch(son_id){
-
- case 0:
- switch(cmd){
-
- case MEMDEV_IOCPRINT: //Print information
- printk("TQ210_LED1 demo to stephen zhou\n");
- break;
-
- case MEMDEV_IOCGETDATA: //Get parameters
- return __put_user(par,(int*) arg);
- break;
-
- case MEMDEV_IOCSETDATA: //Set parameters
- return __get_user(par,(int*) arg);
- break;
-
- default:
- return -EINVAL;
- break;
- }
- break;
-
- case 1:
- switch(cmd){
-
- case MEMDEV_IOCPRINT: //Print information
- printk("TQ210_LED2 demo to stephen zhou\n");
- break;
-
- case MEMDEV_IOCGETDATA: //Get parameters
- return __put_user(par,(int*) arg);
- break;
-
- case MEMDEV_IOCSETDATA: //Set parameters
- return __get_user(par,(int*) arg);
- break;
-
- default:
- return -EINVAL;
- break;
- }
- break;
- }
最后别忘记打印:
- printk("TQ210_LED[SUCCESS]:ioctl\n");
- return 0;
完整代码:
- static long led_ioctl(struct file* file,unsigned int cmd,unsigned long arg){
-
- int par = 0;
- //get son id
- int son_id = MINOR(file->f_dentry->d_inode->i_rdev);
-
- //cmd su or err
- if(_IOC_TYPE(cmd) != MEMDEV_IOC_MAGIC)
- return -EINVAL;
- if(_IOC_NR(cmd) > MEMDEV_IOC_MAXNR)
- return -EINVAL;
- if (_IOC_DIR(cmd) & _IOC_READ){ if(access_ok(VERIFY_WRITE, (void *)arg, _IOC_SIZE(cmd))){ return -EFAULT; } }
- else if(_IOC_DIR(cmd) & _IOC_WRITE) { if (access_ok(VERIFY_READ, (void *)arg, _IOC_SIZE(cmd))){ return -EFAULT; } }
-
- switch(son_id){
-
- case 0:
- switch(cmd){
-
- case MEMDEV_IOCPRINT: //Print information
- printk("TQ210_LED1 demo to stephen zhou\n");
- break;
-
- case MEMDEV_IOCGETDATA: //Get parameters
- return __put_user(par,(int*) arg);
- break;
-
- case MEMDEV_IOCSETDATA: //Set parameters
- return __get_user(par,(int*) arg);
- break;
-
- default:
- return -EINVAL;
- break;
- }
- break;
-
- case 1:
- switch(cmd){
-
- case MEMDEV_IOCPRINT: //Print information
- printk("TQ210_LED2 demo to stephen zhou\n");
- break;
-
- case MEMDEV_IOCGETDATA: //Get parameters
- return __put_user(par,(int*) arg);
- break;
-
- case MEMDEV_IOCSETDATA: //Set parameters
- return __get_user(par,(int*) arg);
- break;
-
- default:
- return -EINVAL;
- break;
- }
- break;
- }
-
- printk("TQ210_LED[SUCCESS]:ioctl\n");
- return 0;
- }
好了,这里open、write、read、ioctl都已经实现啦,那么我们在写一个简单的app测试一下吧
四、编写测试APP
这里我写了一个闪烁的app代码
在src/app目录下新建一个TQ210_app_led.c的文件,用于用户态的程序
包含基本头文件
- #include <sys/types.h>
- #include <sys/stat.h>
- #include <fcntl.h>
- #include <stdio.h>
- #include <unistd.h>
- #include <string.h>
- #include <sys/ioctl.h>
- #include <stdlib.h>
- #include "../../../include/TQ210_LED/device/TQ210_device_led.h"
这里我写了一个基本的打印函数
- void print(char* led1_state,char* led2_state){
- system("clear");
- printf("/*****************************************************************************\n");
- printf("* *\n");
- printf("* TQ210 LED的demo演示 *\n");
- printf("* Copyright (C) 2021 StephenZhou *\n");
- printf("* *\n");
- printf("*----------------------------------------------------------------------------*\n");
- printf("* Device : State *\n");
- printf("*----------------------------------------------------------------------------*\n");
- if(strcmp(led1_state,"ON") == 0){ printf("* TQ210_LED_ONE : ON *\n"); }
- else{ printf("* TQ210_LED_ONE : OFF *\n"); }
- printf("*----------------------------------------------------------------------------*\n");
- if(strcmp(led2_state,"ON") == 0){ printf("* TQ210_LED_TWO : ON *\n"); }
- else{ printf("* TQ210_LED_TWO : OFF *\n"); }
- printf("*----------------------------------------------------------------------------*\n");
- printf("* Change History : *\n");
- printf("* <Date> | <Version> | <Author> | <Description> *\n");
- printf("*----------------------------------------------------------------------------*\n");
- printf("* 2020/5/25 | 1.0.0.0 | StephenZhou | LED Demo *\n");
- printf("*----------------------------------------------------------------------------*\n");
- printf("* *\n");
- printf("*****************************************************************************/\n");
-
- }
第一步就是声明基本变量,然后就按照open、write的方式写就可以了,注释我写的非常清楚
就是先open打开,然后read读取状态,把状态打印出来,并且调用ioctl来打印基本信息,在使用write写入状态。
- int main(int argc,char **argv){
-
- /* Two LEDs flash each other and print the status */
- int cmd = 0,arg = 0,val = 0;
- char led1_state[4] = {0},led2_state[4] = {0};
- //1. open udev device
- int led_fd1 = open(LED_DEV_ONE_NAME,O_RDWR);
- int led_fd2 = open(LED_DEV_TWO_NAME,O_RDWR);
- if(led_fd1 == -1 || led_fd2 == -1){
- printf("error:can't open led device\n");
- return -1;
- }
-
- //2. print msg to kernel ioctl
- cmd = MEMDEV_IOCPRINT;
- if(ioctl(led_fd1,cmd,&arg) == -1) { printf("error:can't ioctl for led1\n"); return -1; }
- cmd = MEMDEV_IOCPRINT;
- if(ioctl(led_fd2,cmd,&arg) == -1) { printf("error:can't ioctl for led2\n"); return -1; }
-
- //3. wink
- while(1){
-
- //led one wink led two close
- val = 1;
- if(write(led_fd1,&val,sizeof(val)) == -1){ printf("error:can't write for led1\n"); return -1; }
- val = 0;
- if(write(led_fd2,&val,sizeof(val)) == -1){ printf("error:can't write for led2\n"); return -1; }
-
- //clear string
- memset(led1_state,0,sizeof(led1_state));
- memset(led2_state,0,sizeof(led2_state));
-
- //read led state
- if(read(led_fd1,led1_state,sizeof(led1_state)) == -1){ printf("error:cant't read for led1\n"); return -1; }
- if(read(led_fd2,led2_state,sizeof(led2_state)) == -1){ printf("error:cant't read for led2\n"); return -1; }
- print(led1_state,led2_state);
-
- sleep(3);
-
- //led two wink led one close
- val = 1;
- if(write(led_fd2,&val,sizeof(val)) == -1){ printf("error:can't write for led1\n"); return -1; }
- val = 0;
- if(write(led_fd1,&val,sizeof(val)) == -1){ printf("error:can't write for led2\n"); return -1; }
-
- //clear string
- memset(led1_state,0,sizeof(led1_state));
- memset(led2_state,0,sizeof(led2_state));
-
- //read led state
- if(read(led_fd1,led1_state,sizeof(led1_state)) == -1){ printf("error:cant't read for led1\n"); return -1; }
- if(read(led_fd2,led2_state,sizeof(led2_state)) == -1){ printf("error:cant't read for led2\n"); return -1; }
- print(led1_state,led2_state);
-
- sleep(3);
-
- }
-
- return 0;
- }
我们在把app文件添加到make里,用交叉编译器
以下是我修改后的make
我使用了一些mv命令来把生成的临时文件以及目标文件都放到固定目录中。
- ifneq ($(KERNELRELEASE),)
- obj-m := ./src/TQ210_LED/device/TQ210_device_led.o
- else
- KDIR := /home/beis/TQ/opt/EmbedSky/TQ210/Kernel_3.0.8_TQ210_for_Linux_v2.4
- all:
- $(MAKE) -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-embedsky-linux-gnueabi-
- arm-embedsky-linux-gnueabi-gcc ./src/TQ210_LED/app/TQ210_app_led.c -o TQ210_app_led
- mv ./src/TQ210_LED/device/*.o ./output
- mv *.symvers ./output
- mv *.order ./output
- mv ./src/TQ210_LED/device/*.mod.c ./output
- mv ./src/TQ210_LED/device/*.ko ./arch/arm/TQ210_LED
- mv TQ210_app_led ./arch/arm/TQ210_LED
- clean:
- $(MAKE) -C $(KDIR) M=$(PWD) clean
- rm ./output/*
- rm ./arch/arm/TQ210_LED/*
- rm ./arch/arm/network/*
- endif
这个时候你在make一下就能在arch/arm/TQ210_LED目录下看到app和.ko文件了。
- beis@ubuntu:~/moudul/arch/arm/TQ210_LED$ tree
- .
- ├── TQ210_app_led
- └── TQ210_device_led.ko
-
- 0 directories, 2 files
最后别忘记git一下
- git add .
- git commit -m "two"
到这一步基本一个demo就已经写完了,那么接下里我们让它物联网
写一个server服务器来控制它
以下代码是我以前写过web ui的方法实现的。
五. 物联网
在src目录下新建一个network目录,在此目录新建一个server.c文件,同理include目录也是一样
这部分如果你对http开发以及网站开发没有开发经验的话可以跳过,这里我是自己写的服务器是为了让大家更清楚了解物联网原理,可以去看下我关于http协议的讲解,以及我开源的http解析代码
- mkdir src/network
- touch src/network/server.c
- mkdir include/network
- touch include/network/server.h
我们在写一个html用来展示前端,其就post的提交
代码很简单,存放在src/network目录下
先在.h文件里把协议以及头文件定义出来
- #include <stdio.h>
- #include <strings.h>
- #include <unistd.h>
- #include <sys/stat.h>
- #include <fcntl.h>
- #include <sys/types.h>
- #include <sys/socket.h>
- #include <netinet/in.h>
- #include <arpa/inet.h>
- #include <string.h>
- #include "../../include/TQ210_LED/device/TQ210_device_led.h"
-
- //server config
- #define PORT 8081
- #define BACKLOG 10
-
- //http
- #define STATE_OK "HTTP/1.0 200 OK\r\n"
- #define SERVER_TYPE "Server: DWBServer\r\nContent-Type: text/html;charset=utf-8\r\n\r\n"
-
- //file
- #define INDEX_NAME "./index.html"
-
- //http ops
- #define STATE_GET_INDEX 1
- #define STATE_BUTTON_FOO 2
- #define STATE_200 3
-
- //led
- #define LED_1 1
- #define LED_2 2
- #define LED_UP 3
- #define LED_DOWN 4
思路就是post提交给服务器,服务器拿到post数据然后判断数据信息来执行对应的功能
这里使用了form的表格实现了这一功能
- <html>
- <body>
- <form action = "" method = "post">
- <button name="foo" value="LED1_Light">LED1_点亮</button>
- </form>
- <form action = "" method = "post">
- <button name="foo" value="LED1_Ext">LED1_熄灯</button>
- </form>
- <form action = "" method = "post">
- <button name="foo" value="LED2_Light">LED2_点亮</button>
- </form>
- <form action = "" method = "post">
- <button name="foo" value="LED2_Ext">LED2_熄灯</button>
- </form>
- </body>
- </html>
server.c部分
首先包含头文件:
#include "../../include/network/server.h"在写一个解析http协议的head代码:
这一部分是用来获取报文头的,便于服务器判断请求参数是什么
- int GetHead(char* buff,char* t){
-
- if(buff == NULL || t == NULL){
- return -1;
- }
- int str_len = strlen(buff);
- int i = 0;
- for(; i<str_len ;++i){
-
- if(buff[i] == '\r'){
- break;
- }
-
- t[i] = buff[i];
-
- }
-
- return 0;
-
- }
在写一个函数用来获取报文尾部,因为post提交的话文本会在报文体的尾部
- int GetEnd(char* buff,char* t){
- if(buff == NULL || t == NULL){
- return -1;
- }
-
- int i = strlen(buff);
- int count = 0;
- int d = 0;
- int y = 0;
- for(;i>0;--i){
- if(buff[i] == '\n'){
- break;
- }
- ++count;
- }
-
- d = strlen(buff) - count+1;
- for(;buff[d] != '\0';++d){
- t[y++] = buff[d];
-
- }
-
- return 0;
- }
然后在写一个获取HTTP状态的函数,这一部分主要利用解析到的文本头来判断http客户端执行了什么操作,然后返回给我们,便于我们做对应的操作
- int GET_HTTP_STATE(char* buff){
-
- if(buff == NULL){
- return 0;
- }
-
- char Head[256] = {0};
- GetHead(buff,Head);
- if(Head == NULL){ return 0; }
-
- if(strcmp(Head,"GET / HTTP/1.1") == 0){
-
- return STATE_GET_INDEX;
-
- }
-
- char ff[256] = {0};
- if(strcmp(Head,"POST / HTTP/1.1") == 0){
-
- return STATE_BUTTON_FOO;
-
- }
-
- return STATE_200;
-
- }
然后就是led操作的函数,这个就不用多说了,非常简单
- int Led_Ops(int LED_INDEX,int STATE){
-
- int fd = 0;
- int val = 0;
-
- if(LED_INDEX == LED_1){
-
- fd = open(LED_DEV_ONE_NAME,O_RDWR);
- if(fd == -1) { return -1; }
- }
-
- if(LED_INDEX == LED_2){
- fd = open(LED_DEV_TWO_NAME,O_RDWR);
- if(fd == -1) { return -1; }
- }
-
- if(STATE == LED_UP){
- val = 1;
- write(fd,&val,sizeof(val));
- }
-
- if(STATE == LED_DOWN){
- val = 0;
- write(fd,&val,sizeof(val));
- }
-
- close(fd);
-
- }
最后就是exec的事件函数,根据返回的状态执行对应的操作,最后也要给http客户端进行反馈,200告诉它我们完成了工作,其次post提交之后我们也要返回页面,因为http客户端会显示服务器返回的数据。
- int Http_Exec(int state,int fd,char* buff){
-
- char rt[2*1024] = {0};
- if(state == STATE_GET_INDEX){
- strcat(rt,STATE_OK);
- strcat(rt,SERVER_TYPE);
- strcat(rt,index_body);
- send(fd,rt,strlen(rt),0);
- }
-
- if(state == STATE_BUTTON_FOO){
- char fun[256] = {0};
- GetEnd(buff,fun);
- strcat(rt,STATE_OK);
- strcat(rt,SERVER_TYPE);
- strcat(rt,index_body);
- send(fd,rt,strlen(rt),0);
- if(strcmp(fun,"foo=LED1_Light") == 0){
- Led_Ops(LED_1,LED_UP);
- }
- if(strcmp(fun,"foo=LED1_Ext") == 0){
- Led_Ops(LED_1,LED_DOWN);
- }
- if(strcmp(fun,"foo=LED2_Light") == 0){
- Led_Ops(LED_2,LED_UP);
- }
- if(strcmp(fun,"foo=LED2_Ext") == 0){
- Led_Ops(LED_2,LED_DOWN);
- }
-
- }
-
- if(state == STATE_200){
- strcat(rt,STATE_OK);
- strcat(rt,SERVER_TYPE);
- send(fd,rt,strlen(rt),0);
- }
-
- return 0;
- }
然后就是main函数
先初始化tcp,这里我写的不是多线程,是单线程的,也就是说同一时间只能有一个http客户端响应。
- int listenfd, connectfd;
- struct sockaddr_in server, client;
- socklen_t addrlen;
-
- if((listenfd = socket(AF_INET, SOCK_STREAM, 0)) == -1){
- perror("[SERVER_ERROR] socket\n");
- return -1;
- }
-
- int opt = 1;
- setsockopt(listenfd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt));
- bzero(&server, sizeof(server));
- server.sin_family = AF_INET;
- server.sin_port = htons(PORT);
- server.sin_addr.s_addr = htonl(INADDR_ANY);
-
- if(bind(listenfd, (struct sockaddr *)&server, sizeof(server)) == -1){
- perror("[SERVER_ERROR] bind\n");
- return -1;
- }
-
- addrlen = sizeof(client);
-
- FILE* fp = fopen(INDEX_NAME,"r");
- if(fp == NULL){
- perror("[SERVER_ERROR] index.html file\n");
- return -1;
- }
-
把index.html读取出来,返回给客户端
fread(index_body,sizeof(index_body),1,fp);然后while循环监听并执行事件
- while(1){
-
- if(listen(listenfd, BACKLOG) == -1){
- perror("[SERVER_ERROR] listen\n");
- return -1;
- }
-
- if((connectfd = accept(listenfd, (struct sockaddr *)&client, &addrlen)) == -1){
- perror("[SERVER_ERROR] accept\n");
- return -1;
- }
-
- char buff[1024] = {0};
- recv(connectfd,buff,1024,0);
- //printf("%s\n",buff);
- Http_Exec(GET_HTTP_STATE(buff),connectfd,buff);
- close(connectfd);
- }
最后的关闭tcpfd
- close(listenfd);
- return 0;
六.在make添加支持
- arm-embedsky-linux-gnueabi-gcc ./src/network/server.c -o server
- mv server ./arch/arm/network
- cp ./src/network/index.html ./arch/arm/network
好了到这一步就彻底写完啦。
完整的make:
- ifneq ($(KERNELRELEASE),)
- obj-m := ./src/TQ210_LED/device/TQ210_device_led.o
- else
- KDIR := /home/beis/TQ/opt/EmbedSky/TQ210/Kernel_3.0.8_TQ210_for_Linux_v2.4
- all:
- $(MAKE) -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-embedsky-linux-gnueabi-
- arm-embedsky-linux-gnueabi-gcc ./src/TQ210_LED/app/TQ210_app_led.c -o TQ210_app_led
- arm-embedsky-linux-gnueabi-gcc ./src/network/server.c -o server
- mv ./src/TQ210_LED/device/*.o ./output
- mv *.symvers ./output
- mv *.order ./output
- mv ./src/TQ210_LED/device/*.mod.c ./output
- mv ./src/TQ210_LED/device/*.ko ./arch/arm/TQ210_LED
- mv TQ210_app_led ./arch/arm/TQ210_LED
- mv server ./arch/arm/network
- cp ./src/network/index.html ./arch/arm/network
- clean:
- $(MAKE) -C $(KDIR) M=$(PWD) clean
- rm ./output/*
- rm ./arch/arm/TQ210_LED/*
- rm ./arch/arm/network/*
- endif
git保存
- git add .
- git commit -m "three"
七. 最终演示
使用你的方式在把arch/arm下两个目录的文件全部传输到开发板
我用的是dropbear
然后ssh登入进去执行。
我们是ssh登入进去的,所以很多命令都在/sbin目录下
加载模块:
/sbin/insmod TQ210_device_led.ko然后查看一下日志

可以看到成功加载。
然后我们在运行app demo演示:
在看一下server演示:
因是GIF所以比较模糊,大家可以自行测试
这里是github的项目地址:https://github.com/beiszhihao/Internet-of-things-project
日后所有基于物联网的项目我都会开源在这个仓库中
欢迎大家star
原文链接:https://blog.csdn.net/bjbz_cxy/article/details/117595265
所属网站分类: 技术文章 > 博客
作者:狗蛋你别跑
链接:http://www.phpheidong.com/blog/article/89705/39474f9a68ac9a8d382f/
来源:php黑洞网
任何形式的转载都请注明出处,如有侵权 一经发现 必将追究其法律责任
昵称:
评论内容:(最多支持255个字符)
---无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事,而不是让内心的烦躁、焦虑,坏掉你本来就不多的热情和定力